4 软件操作指引
4.1 查找设备IP
4.2 远程登录
4.3 配置存储设备
4.4 配置以太网 IP
4.5 配置Wi-Fi (可选)
4.6 配置蓝牙 (可选)
4.7 RTC
ED-CM4NANO内置RTC,对于国内销售的版本,我们出货会默认附带安装CR1220纽扣电池(RTC备份电源)。这样,可以保障系统有一个不间断的可靠的时钟,不受设备下电等因素影响。
默认出货系统镜像,会集成我们编写的RTC自动同步服务,客人无需设置,即可自动同步时钟,可无感使用RTC。大概的原理是:
- 系统开机时,服务自动从RTC读出保存的时间,并同步到系统时间。
- 若有连接互联网,系统会自动从NTP服务器同步时间, 使用互联网时间更新本地系统时间。
- 系统关机时,服务自动把系统时间写入RTC, 更新RTC的时间。
- 因为有安装纽扣电池,尽管CM4 Nano下电,但是RTC仍在工作计时。
这样,可以保证我们的时间是准确可靠的。
注意
若是第一次开机,因为RTC中无有效时间,可能会同步失败,直接重启即可。重启的时候,会把系统时间写入RTC,后续正常使用。
若您不想用此服务, 可手动关闭:
sudo systemctl disable rtc
sudo reboot
重新使能此服务:
sudo systemctl enable rtc
sudo reboot
手动读取RTC的时间:
sudo hwclock -r
2022-11-09 07:07:30.478488+00:00
手动同步RTC时间到系统:
sudo hwclock -s
把系统时间写入RTC:
sudo hwclock -w
4.8 Buzzer
蜂鸣器使用GPIO6来控制。
- 打开蜂鸣器:
raspi-gpio set 6 op dh
- 关闭蜂鸣器:
raspi-gpio set 6 op dl
4.9 串口通信
4.9.1 安装picocom工具
在Linux环境下,可使用picocom串口终端进行串口调试。
- 执行如下命令,安装picocom。
sudo apt-get install picocom
按需执行如下命令:
- 输入Ctrl+a,再输入Ctrl+h,查看可用命令。
*** Picocom commands (all prefixed by [C-a])
*** [C-x] : Exit picocom
*** [C-q] : Exit without reseting serial port
*** [C-b] : Set baudrate
*** [C-u] : Increase baudrate (baud-up)
*** [C-d] : Decrease baudrate (baud-down)
*** [C-i] : Change number of databits
*** [C-j] : Change number of stopbits
*** [C-f] : Change flow-control mode
*** [C-y] : Change parity mode
*** [C-p] : Pulse DTR
*** [C-t] : Toggle DTR
*** [C-g] : Toggle RTS
*** [C-|] : Send break
*** [C-c] : Toggle local echo
*** [C-w] : Write hex
*** [C-s] : Send file
*** [C-r] : Receive file
*** [C-v] : Show port settings
*** [C-h] : Show this message
先输入Ctrl+a,再输入Ctrl+c,切换本地回显模式。
先输入Ctrl+a,再输入Ctrl+q,退出picocom。
4.9.2 Debug UART
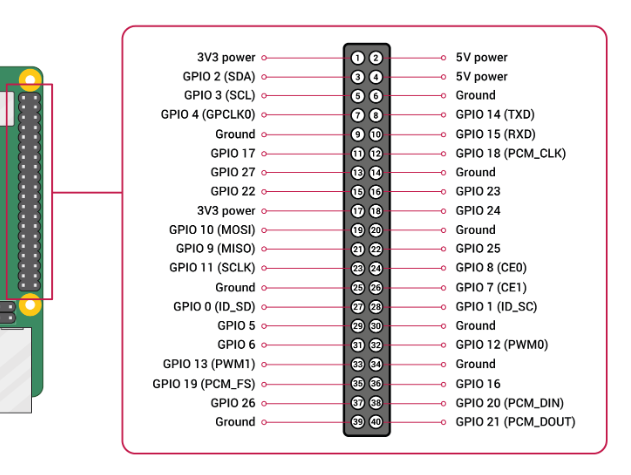
ED-CM4NANO预留的40-Pin中包含1个调试串口(GPIO14和GPIO15分别为读写引脚),可通过如下步骤将其使能。
- 执行如下命令,打开
raspi-config
sudo raspi-config
选择
option 3 - Interface Options。选择
option P6 - Serial Port。提示
Would you like a login shell to be accessible over serial?回答Yes。退出
raspi-config执行如下命令,重启设备,使配置生效。
sudo reboot
- 执行如下命令,打开
config.txt配置文件,并在文件末尾添加enable_uart=1。
sudo nano /boot/config.txt
提示
调试串口默认波特率为115200,您可以通过cmdline.txt文件查看当前调试串口波特率。
sudo nano /boot/cmdline.txt