Raspberry Pi Compute Module Zero
文档说明
Raspberry Pi Compute Module Zero是Raspberry Pi官方产品,产品的品牌属于Raspberry Pi,产品的IP属于Raspberry Pi。
本文档由上海晶珩电子科技有限公司翻译。由于翻译水平有限,可能会存在翻译不准确的地方。如果发现翻译后的内容不完整或者不准确,请及时联系(可发送邮件至support@edatec.cn)。
最终解释权及最准确的文档版本,请以Raspberry Pi官方发布的内容为准。
1 简介
介绍Raspberry Pi Compute Module Zero (简称CM0)的定义和特性。
1.1 概述
CM0是一款围绕RP3A0芯片构建的系统级模块(SoM),RP3A0芯片由Raspberry Pi自主研发,采用定制化系统级封装设计。CM0模块以紧凑可嵌入的外形规格集成了板载RAM与可选无线网络连接功能,完整实现了Raspberry Pi Zero 2 W的核心处理能力,助力开发人员和系统设计师将Raspberry Pi功能集成至定制化硬件设计中。
Raspberry Pi CM0模块采用直接焊接至载板的设计,通过模块边缘分布的132个连接端实现电气连接,这些焊点以1mm间距等距排列。该模块既支持手工焊接方式,也可在自动化PCB组装过程中采用标准表面贴装工艺进行焊接。
由于CM0模块是基于Raspberry Pi Zero 2 W架构开发,故开发者可在构建最终CM0产品前,先行在Raspberry Pi Zero 2 W平台上进行项目测试。CM0作为全新核心模块,瞄准现有市场的入门级领域,通过低成本与高性能组合策略实现突破。针对成本敏感型应用场景,可提供去除eMMC闪存的精简版本,该版本命名为CM0精简版(CM0Lite)。
提示
除非另有说明,本文档中CM0的表述同时涵盖CM0Lite。
图1 CM0


图2 CM0Lite

1.2 特性
CM0的主要特性如下:
高性能SoC:采用Broadcom BCM2837,1GHz 四核 64位 Arm Cortex-A53 处理器
紧凑型封装:39mm × 33mm × 2.8mm模块
邮票孔封装,孔中心距1mm,132引脚布局
视频支持:Full HD(1080p)30fps视频编解码
- 支持H.264/MPEG-4格式1080p30解码
- 支持H.264格式1080p30编码
图形支持:通过OpenGL ES 1.1/2.0支持2D/3D图形处理
内存配置:512MB LPDDR2运行内存
可选存储:板载8GB或16GB eMMC闪存
额外SDIO接口(仅适用于CM0Lite):可替代板载eMMC实现外部存储或外围扩展
无线连接(选配):支持Wi-Fi与蓝牙(带IPEX-1型外部天线接口)
1 x USB 2.0接口
28路GPIO(通用输入/输出接口)
摄像头支持:4通道CSI摄像头接口
视频输出:
- 1 x HDMI 端口,支持1080p30Hz
- 1 x 4通道MIPI DSI显示端口
- 1 x DPI显示接口
- 1 x 复合视频端口
单路+5V电源输入
板载绿色LED状态指示灯
2 接口
CM0提供多样化接口支持,可满足从数据存储、网络通信到无线连接、显示输出及灵活GPIO扩展等各类应用需求。这些接口使开发者能够构建具有连接能力和高度适应性的嵌入式系统。下文将针对每个接口提供技术说明,包括配置选项、布线指南与设计注意事项。
2.1 无线
CM0支持Wi-Fi和蓝牙功能,允许开发人员和系统设计人员灵活管理各种应用的无线连接。其无线接口由Cypress CYW43439芯片提供,具体支持:
2.4 GHz IEEE 802.11 b/g/n Wi-Fi
蓝牙5.0及低功耗蓝牙(BLE)
提示
前期小批量试产的CM0的蓝牙版本为蓝牙4.2,后期批量供货的CM0的蓝牙版本为蓝牙5.0。
天线采用标准IPEX-1接口,Raspberry Pi Ltd提供了经认证的配套天线。若你选择第三方天线,需自行获取认证,Raspberry Pi不对未授权天线提供认证支持。
用户可根据需求独立启用或禁用无线功能。例如在自助服务终端场景中,服务工程师可临时开启无线功能进行系统更新,随后将其关闭以满足安全性和法规合规要求。
为支持功耗优化与法规符合性,CM0预留了两个控制引脚:WiFi_ON和BT_ON。
提示
在不带Wi-Fi功能的CM0模块上,WiFi_ON和BT_ON引脚作为预留。
2.1.1 WiFi_ON
WiFi_ON引脚用于指示Wi-Fi的启用/禁用状态,并可用于禁用 Wi-Fi。该引脚仅可被拉低,而不可被驱动为高电平;当需要时,软件驱动会在内部将其驱动为高电平。
如果该引脚为高电平(逻辑 1),则开启Wi-Fi。如果在禁用后重新启用Wi-Fi,则必须重新初始化Wi-Fi驱动。
当该引脚被驱动或拉低至低电平(逻辑 0) 时,将阻止Wi-Fi开启,有助于降低功耗或满足物理禁用Wi-Fi的要求。
2.1.2 BT_ON
BT_ON引脚用于指示蓝牙的启用/禁用状态,并可用于禁用蓝牙。该引脚仅可被拉低,而不可被驱动为高电平;当需要时,软件驱动会在内部将其驱动为高电平。
如果该引脚为高电平(逻辑 1),则开启蓝牙。如果在禁用后重新启用蓝牙,则必须重新初始化蓝牙驱动。
当该引脚被驱动或拉低至低电平(逻辑 0) 时,将阻止蓝牙开启,有助于降低功耗或满足物理禁用蓝牙的要求。
2.2 USB 2.0
USB 2.0接口支持最高480Mb/s的信号传输速率。差分对应按90Ω差分阻抗进行布线,每组差分对中的P信号与N信号应进行长度匹配,理想误差应控制在0.15mm以内。
如需启用USB 2.0功能,请在config.txt配置文件中添加dtoverlay=dwc2,dr_mode=host来设置。
提示
USB 2.0端口支持USB OTG模式运行。虽然此功能未在官方文档中明确说明,但已有用户成功启用该功能。USB_OTG_ID引脚用于确定设备角色(主机或从设备),通常需连接至Micro USB接口的ID引脚。 如需要使用OTG功能,必须在操作系统(OS)中启用此功能。若需固定设备角色,可将USB_OTG_ID引脚接地。
2.3 CSI(MIPI摄像头)
CM0模块支持4通道CSI接口,可实现高速相机连接。该接口采用四组100Ω差分信号对,同一组差分信号内的导线长度匹配误差应控制在0.15mm以内。
Raspberry Pi官方固件支持下列相机传感器:
- OmniVision OV5647
- Sony IMX219
- Sony IMX296
- Sony IMX477
- Sony IMX708
有关CSI接口的详细信息,请参见Raspberry Pi官方技术文档。
2.4 视频和显示接口
CM0模块支持多种显示接口(如表1),可同时驱动最多三个显示器(支持以下任意接口类型的组合)。
表1 CM0的视频和显示接口
| 接口类型 | 描述 |
|---|---|
| HDMI | 高速数字差分信号显示接口;1080p30(全高清30帧) |
| DSI | 高速4通道差分对显示接口 |
| DPI | 通过GPIO实现的并行显示接口 |
| CVBS | 模拟复合视频接口;需75Ω终端阻抗匹配 |
2.4.1 HDMI
CM0模块支持1路1080p30的HDMI输出接口。为确保HDMI稳定运行,请注意以下设计要点:
HDMI信号必须按100Ω差分对布线;
同一差分对内的信号线长度匹配误差应控制在0.15mm内;
不同差分对间的长度匹配误差需控制在25mm内。
支持消费电子控制(CEC)功能,CM0内部已集成27kΩ上拉电阻;
支持热插拔检测(HPD)功能,CM0内部已集成100kΩ下拉电阻;
扩展显示标识数据(EDID)信号在CM0内部已集成上拉电阻;
与Pi5相同,CM0未在HDMI信号线上添加额外ESD保护(通常无需配置)。请根据实际应用场景评估是否需要增加外部ESD保护电路。
2.4.2 DSI
CM0模块支持通过高速数字DSI接口连接DSI兼容显示器。该接口采用四组差分信号对,必须按100Ω差分阻抗进行布线。同一组差分对内的信号线长度匹配误差应控制在0.15mm内。
CM0兼容以下两种系统支持的显示器:
Raspberry Pi官方固件
主线Linux内核
对于官方未支持的第三方显示器,必须提供自定义驱动程序。
2.4.3 DPI
CM0模块支持最高24位RGB视频输出,配备4个控制信号:像素时钟(PCLK)、数据使能(DE)、垂直同步(VSYNC)与水平同步(HSYNC)。该显示并行接口(DPI)将占用GPIO引脚资源。
可通过降低色彩深度配置来保留部分GPIO功能。
2.4.4 CVBS
CM0模块支持输出多种格式的标准模拟视频(复合视频,亦称CVBS)。该CVBS信号设计为驱动75Ω阻抗模式。
2.5 I2C接口
CM0模块提供两路可重新配置的I2C总线,其功能可根据系统配置与外设使用情况进行调整。
2.5.1 CSI/DSI I2C总线 (SDA0和SCL0)
该I2C总线默认分配给CSI和DSI接口使用。但当CSI/DSI接口未启用时,可重新配置为通用I2C总线或GPIO功能:
- 串行数据引脚(SDA0)连接至GPIO44。
- 串行时钟引脚(SCL0)连接至GPIO45。
2.5.2 HAT扩展板EEPROM识别I2C总线(ID_SD和ID_SC)
HAT扩展板EEPROM识别I2C总线由ID_SD(数据)和ID_SC(时钟)引脚信号构成。该总线通常专用于HAT扩展板身份识别。
若固件未使用此I2C总线(例如未连接HAT ID EEPROM时),这些引脚可重新配置为GPIO0与GPIO1功能。当需要将这两个引脚用作GPIO时,请在config.txt配置文件中添加force_eeprom_read=0参数,该设置将阻止固件检测HAT EEPROM。
2.6 SDIO (仅适用于CM0Lite)
CM0Lite版本未搭载板载eMMC存储器,但提供了安全数字输入输出(SDIO)接口用于连接外部存储设备。为确保信号传输稳定性,SDIO接口需配置与所用存储类型匹配的参考电压(SD_VREF)。CM0Lite的SDIO存储配置如下表2:
表2 SDIO存储配置
| 存储类型 | 连接 | 参考电压 |
|---|---|---|
| 外部eMMC | SDIO | 需将SD_VREF连接至1.8V电源(CM0_1.8V引脚)以实现1.8V信号传输 |
| 外部SD卡 | SDIO | 需将SD_VREF连接至3.3V电源(CM0_3.3V引脚)以实现3.3V信号传输 |
| 板载eMMC | SDIO | 无需连接;SD_VREF引脚可保持悬空或连接至1.8V电源(CM0_1.8V引脚) |
2.7 GPIO
提供28个通用输入/输出(GPIO)引脚,这些引脚与Pi5的40-Pin中的GPIO引脚相对应。这些引脚可访问SMI、DPI、I2C、PWM、SPI和UART等内部外设。相关功能特性及复用选项的详细信息与BCM2835 ARM外设文档中的描述一致。
为最大限度减少电磁兼容性(EMC)问题,建议将驱动强度和压摆率设置为所需的最低水平。GPIO2和GPIO3内置1.8kΩ上拉电阻。
GPIO组的电源由GPIO_VREF电源引脚提供。该引脚可连接至CM0_1.8V以实现1.8V信号电平,或连接至CM0_3.3V以实现3.3V信号电平。所有28个GPIO引脚的总电流负载不得超过50mA,GPIO_VREF必须连接至CM0_3.3V或CM0_1.8V电源。
2.7.1 复用功能分配
GPIO引脚最多支持六种复用功能分配。表3提供了这些复用功能的概览,详细功能说明请参阅外设数据手册。
每个GPIO在同一时间只能启用一种功能。表3中未命名的功能选项均为保留功能。
表3 GPIO功能选择
| GPIO | 默认Pull | 功能 | |||||
|---|---|---|---|---|---|---|---|
| ALT0 | ALT1 | ALT2 | ALT3 | ALT4 | ALT5 | ||
| 0 | High | SDA0 | SA5 | DPI_PCLK | |||
| 1 | High | SCL0 | SA4 | DPI_DE | |||
| 2 | High | SDA1 | SA3 | DPI_VSYNC | |||
| 3 | High | SCL1 | SA2 | DPI_HSYNC | |||
| 4 | High | GPCLK0 | SA1 | DPI_D0 | ARM_TDI | ||
| 5 | High | GPCLK1 | SA0 | DPI_D1 | ARM_TDO | ||
| 6 | High | GPCLK2 | SOE_N | DPI_D2 | ARM_RTCK | ||
| 7 | High | SPI0_CSn1 | SWE_N | DPI_D3 | |||
| 8 | High | SPI0_CSn0 | SD0 | DPI_D4 | |||
| 9 | Low | SPI0_MISO | SD1 | DPI_D5 | |||
| 10 | Low | SPI0_MOSI | SD2 | DPI_D6 | |||
| 11 | Low | SPI0_SCLK | SD3 | DPI_D7 | |||
| 12 | Low | PWM0 | SD4 | DPI_D8 | ARM_TMS | ||
| 13 | Low | PWM1 | SD5 | DPI_D9 | ARM_TCK | ||
| 14 | Low | TXD0 | SD6 | DPI_D10 | TXD1 | ||
| 15 | Low | RXD0 | SD7 | DPI_D11 | RXD1 | ||
| 16 | Low | FL0 | SD8 | DPI_D12 | CTS0 | SPI1_CSn2 | CTS1 |
| 17 | Low | FL1 | SD9 | DPI_D13 | RTS0 | SPI1_CSn1 | RTS1 |
| 18 | Low | PCM_CLK | SD10 | DPI_D14 | SPI1_CSn0 | PWM0 | |
| 19 | Low | PCM_FS | SD11 | DPI_D15 | SPI1_MISO | PWM1 | |
| 20 | Low | PCM_DIN | SD12 | DPI_D16 | SPI1_MOSI | GPCLK0 | |
| 21 | Low | PCM_DOUT | SD13 | DPI_D17 | SPI1_SCLK | GPCLK1 | |
| 22 | Low | SD0_CLK | SD14 | DPI_D18 | SD1_CLK | ARM_TRST | |
| 23 | Low | SD0_CMD | SD15 | DPI_D19 | SD1_CMD | ARM_RTCK | |
| 24 | Low | SD0_DAT0 | SD16 | DPI_D20 | SD1_DAT0 | ARM_TDO | |
| 25 | Low | SD0_DAT1 | SD17 | DPI_D21 | SD1_DAT1 | ARM_TCK | |
| 26 | Low | SD0_DAT2 | TE0 | DPI_D22 | SD1_DAT2 | ARM_TDI | |
| 27 | Low | SD0_DAT3 | TE1 | DPI_D23 | SD1_DAT3 | ARM_TMS | |
| 28 | None | SDA0 | SA5 | PCM_CLK | FL0 | ||
| 29 | None | SCL0 | SA4 | PCM_FS | FL1 | ||
| 40 | Low | PWM0 | SD4 | SD1_DAT4 | SPI2_MSIO | TXD1 | |
| 41 | Low | PWM1 | SD5 | TE0 | SD1_DAT5 | SPI2_MOSI | RXD1 |
| 42 | Low | GPCLK0 | SD6 | TE1 | SD1_DAT6 | SPI2_SCLK | RTS1 |
| 44 | None | GPCLK1 | SDA0 | SDA1 | TE0 | SPI2_CSn1 | |
| 45 | None | PWM1 | SCL0 | SCL1 | TE1 | SPI2_CSn2 | |
2.7.2 GPIO复用功能
多种GPIO复用功能可支持不同的外设接口与通信协议。以下列表汇总了可用外设及其支持配置:
2个UART接口,包含标准信号(发送TXD、接收RXD、清除发送CTS、请求发送RTS)
1个4位SDIO接口
2个脉宽调制(PWM)通道
3个通用时钟(GPCLK)输出
1个显示并行接口(DPI),包含像素时钟PCLK、数据使能DE、垂直同步VSYNC、水平同步HSYNC及最高24位数据总线
2个I2C控制器
3个SPI控制器
2.7.3 Camera GPIO (CAM_GPIO)
CM0模块提供了一个专用于控制相机模块的GPIO引脚,命名为CAM_GPIO0。该控制信号通常连接至相机接口的第17针脚,用于控制相机模块的电源通断。CAM_GPIO0在板内实际对应GPIO40引脚。
2.8 状态LED(LED_nACT)
SoC上的GPIO29引脚控制LED_nACT信号,该信号复现了用于显示板载运行状态的LED。此状态LED的行为与Raspberry Pi Zero 2 W的绿色LED特性相似。在Linux系统下:
当eMMC或SD卡进行数据读写时,LED会闪烁。
若启动过程中发生错误,LED会按特定错误码模式闪烁。
具体错误码模式解读请参阅Raspberry Pi官方文档中的LED闪烁代码。
该信号为低电平有效,若需驱动外部LED需添加信号缓冲器。
2.9 电源管理与控制
表4所示的信号涉及CM0的电源时序控制、启动源选择及系统就绪状态指示:全局使能信号(GLOBAL_EN)、Raspberry Pi启动模式选择(nRPI_BOOT)和运行电源良好指示(RUN_PG)。
表4 系统控制信号
| Pin | 描述 | 使用 |
|---|---|---|
| GLOBAL_EN | 控制CM0模块的断电状态 | 将该引脚拉低可使CM0进入最低功耗状态。建议仅在操作系统(OS)完成关机操作后拉低此引脚。 |
| nRPI_BOOT | 用于确定启动时的启动源 | 在启动过程中保持低电平可跳过eMMC,转而通过USB 2.0接口启动。 |
| RUN_PG | 当电源单元(PSU)完成上电后,该信号将变为高电平 | 可主动拉低此信号以延迟上电或重置模块。建议仅在操作系统(OS)完成关机操作后拉低此引脚。 |
3 电源
CM0模块需要稳压5V直流供电才能正常运行。该模块还可为外部设备提供3.3V和1.8V电压(最大600mA的电流)输出。下文将详细说明必需的上电/断电时序、典型与最大功耗值,以及板载电压调节器的各项参数。
3.1 上电时序
以下列表总结了CM0正常启动所需的上电条件与时序规范:
在5V电源轨激活前,所有引脚不得带电。
若要通过USB启动CM0,nRPI_BOOT引脚必须在5V电源轨上升后的1ms内保持低电平。
5V电源轨应单调上升到至少4.75V,并在运行期间始终保持该电压以上。
上电时序在5V电源轨超过4.75V且GLOBAL_EN信号上升后启动。
电源与信号按以下顺序依次激活:
5V电源轨上升。
GLOBAL_EN信号上升。
CM0_3.3V电源轨上升。
CM0_1.8V电源轨上升(至少延迟CM0_3.3V上升时间1ms)。
3.2 下电时序
以下列表总结了CM0推荐的断电流程与注意事项,以确保安全关机和文件系统完整性:
为保证文件系统一致性,应在切断电源前先关闭操作系统。
若无法实现受控关机,建议选用
btrfs、f2fs或overlayfs等文件系统(可通过raspi-config工具启用)。操作系统完成关机后,可切断5V电源轨或将
GLOBAL_EN引脚拉低,使CM0进入最低功耗模式。断电过程中,
CM0_1.8V电源轨将先于CM0_3.3V电源轨放电。
3.3 功耗
CM0的实际功耗取决于运行任务类型,典型值如下:
• 最低关机功耗出现于GLOBAL_EN引脚拉低时,典型值约500μA。
• 空闲功耗典型值为225mA(具体数值因操作系统而异)。
• 工作功耗典型值约675mA(取决于操作系统及运行任务)。
3.4 稳压器输出
CM0内置电压稳压器,可提供3.3V(CM0_3.3V)和1.8V(CM0_1.8V)电源轨。每个稳压器最多可为连接板载的外部设备提供600mA电流。
提示
外设从这些稳压器汲取的电流不包含在总功耗数据中,已标注的功耗值仅包含板载自身功耗,不包含通过稳压器供电的外设功耗。
4 规格
本章节包含CM0模块组件功能的技术说明,包含尺寸规格、引脚定义、电气参数、热特性及平均故障间隔时间(MTBF)计算等核心内容。
4.1 机械规格
CM0采用FR4材料制成的紧凑型PCB板,其132个引脚为1mm间距的焊盘,采用半孔金属化工艺并施加高质量化学沉镍金(ENIG)表面处理,以确保焊接可靠性。后续章节将详细说明PCB尺寸规范及推荐封装设计。
4.1.1 PCB尺寸
CM0是一款尺寸为39mm×33mm×2.8mm的紧凑型模块。图3所示的机械示意图展示了CM0的俯视图,包括其外形尺寸、关键元件(含SoC、无线模块与IPEX-1连接器)的外部布局及132个引脚排列。引脚编号从模块左上角起始按逆时针方向排列,每个引脚宽度为0.6mm,同一边缘相邻引脚间距为1mm。
图3 CM0的PCB尺寸
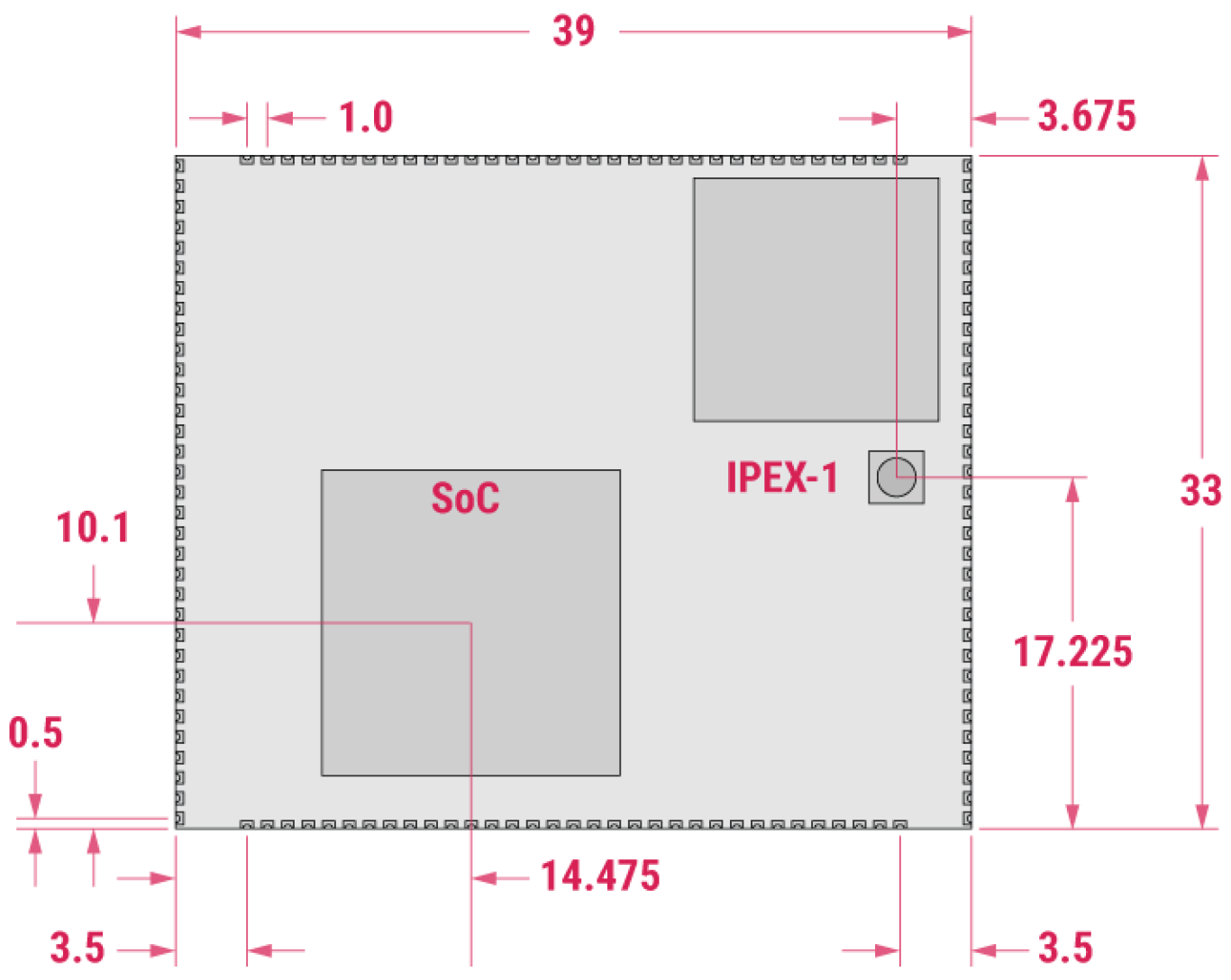
单位:mm
4.1.2 推荐的封装设计
图4展现了CM0推荐的封装设计。
图4 CM0推荐的封装设计
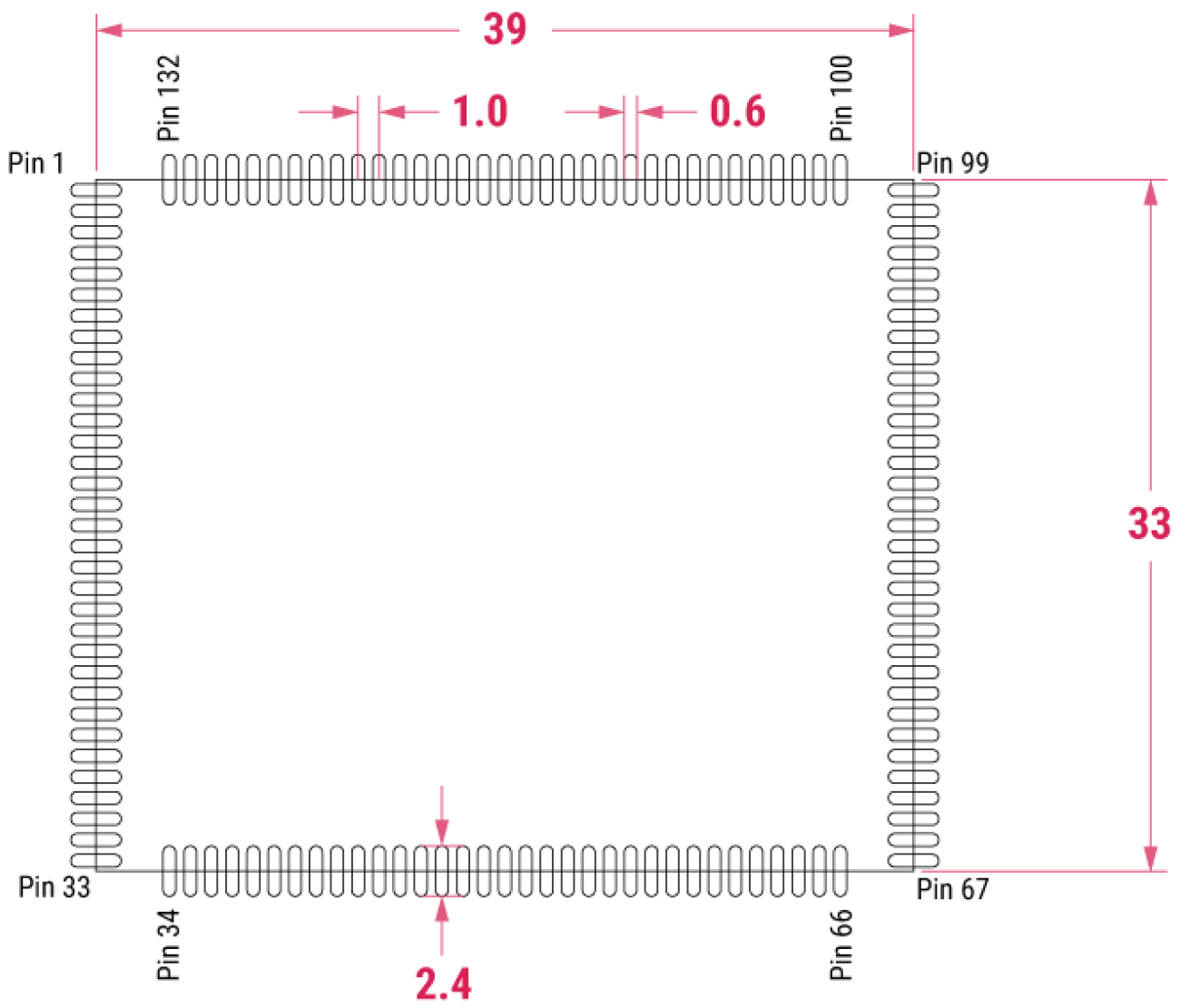
单位:mm
4.2 引脚
CM0模块包含132个引脚,具体的引脚定义如表5。
表5 CM0引脚
| 引脚 | 信号 | 描述 |
|---|---|---|
| 1 | GND | 接地(0V) |
| 2 | DSI_D3_P | 输出显示通道D3正极 |
| 3 | DSI_D3_N | 输出显示通道D3负极 |
| 4 | GND | 接地(0V) |
| 5 | DSI_D2_P | 输出显示通道D2正极 |
| 6 | DSI_D2_N | 输出显示通道D2负极 |
| 7 | GND | 接地(0V) |
| 8 | DSI_CL_P | 输出显示时钟正极 |
| 9 | DSI_CK_N | 输出显示时钟负极 |
| 10 | GND | 接地(0V) |
| 11 | DSI_D1_P | 输出显示通道D1正极 |
| 12 | DSI_D1_N | 输出显示通道D1负极 |
| 13 | GND | 接地(0V) |
| 14 | DSI_D0_P | 输出显示通道D0正极 |
| 15 | DSI_D0_N | 输出显示通道D0负极 |
| 16 | GND | 接地(0V) |
| 17 | HDMI_HPD | 输入HDMI热插拔检测 |
| 18 | HDMI_SDA | 双向 HDMI 配置数据线 (SDA) |
| 19 | HDMI_SCL | 双向 HDMI 配置时钟线 (SCL) |
| 20 | HDMI_CEC | 输入 HDMI CEC 数据线(已通过 CM0 电平转换至 3.3V LVCMOS) |
| 21 | GND | 接地(0V) |
| 22 | HDMI_CK_N | 输出 HDMI 时钟负极 |
| 23 | HDMI_CK_P | 输出 HDMI 时钟正极 |
| 24 | GND | 接地(0V) |
| 25 | HDMI_D0_N | 输出 HDMI TX0 负极 |
| 26 | HDMI_D0_P | 输出 HDMI TX0 正极 |
| 27 | GND | 接地(0V) |
| 28 | HDMI_D1_N | 输出 HDMI TX1 负极 |
| 29 | HDMI_D1_P | 输出 HDMI TX1 正极 |
| 30 | GND | 接地(0V) |
| 31 | HDMI_D2_N | 输出 HDMI TX2 负极 |
| 32 | HDMI_D2_P | 输出 HDMI TX2 正极 |
| 33 | GND | 接地(0V) |
| 34 | GND | 接地(0V) |
| 35 | USB_N | USB 2.0 D- |
| 36 | USB_P | USB 2.0 D+ |
| 37 | GND | 接地(0V) |
| 38 | USB_OTG | 输入(3.3V信号):USB OTG功能引脚;内部集成上拉电阻;当该引脚接地时,CM0将切换为USB主机模式,但需配合正确的操作系统驱动使用 |
| 39 | CVBS | 复合视频输出 |
| 40 | GND | 接地(0V) |
| 41 | CM0_3.3V (输出) | 3.3V±5% 精度,每引脚最大输出电流300mA,总和不得超过600mA;当GLOBAL_EN设置为低电平时将切断供电 |
| 42 | SDA0 | I2C数据引脚(GPIO44):通常用于摄像头和显示模块;内部集成1.8 kΩ上拉电阻至CM0_3.3V电源 |
| 43 | SCL0 | I2C时钟引脚(GPIO45):通常用于摄像头和显示模块;内部集成1.8 kΩ上拉电阻至CM0_3.3V电源 |
| 44 | CAM_GPIO | 3.3V信号:可作为GPIO使用(GPIO40) |
| 45 | GND | 接地(0V) |
| 46 | CSI_D3_P | 摄像头输入D3正极 |
| 47 | CSI_ D3_N | 摄像头输入D3负极 |
| 48 | GND | 接地(0V) |
| 49 | CSI_D2_P | 摄像头输入D2正极 |
| 50 | CSI_D2_N | 摄像头输入D2负极 |
| 51 | GND | 接地(0V) |
| 52 | CSI_CK_P | 摄像头输入时钟正极 |
| 53 | CSI_CK_N | 摄像头输入时钟负极 |
| 54 | GND | 接地(0V) |
| 55 | CSI_D1_P | 摄像头输入D1正极 |
| 56 | CSI_ D1_N | 摄像头输入D1负极 |
| 57 | GND | 接地(0V) |
| 58 | CSI_D0_P | 摄像头输入D0正极 |
| 59 | CSI_ D0_N | 摄像头输入D0负极 |
| 60 | GND | 接地(0V) |
| 61 | RUN_PG | 双向引脚。可通过220Ω电阻将其拉低以实现CM0 CPU复位;作为输出时,高电平表示电源状态正常且CPU正在运行。内部通过10KΩ电阻上拉至CM0_3.3V电源。 |
| 62 | GLOBAL_EN | 输入引脚;拉低此引脚可切断CM0内部电源,通过10KΩ电阻上拉至5V电源轨 |
| 63 | GND | 接地(0V) |
| 64 | CM0_1.8V (输出) | 1.8V±5% 精度。每引脚最大输出电流300mA,总输出不得超过600mA;当GLOBAL_EN设置为低电平时将切断供电 |
| 65 | CM0_1.8V (输出) | 1.8V±5% 精度。每引脚最大输出电流300mA,总输出不得超过600mA;当GLOBAL_EN设置为低电平时将切断供电 |
| 66 | GND | 接地(0V) |
| 67 | 5V (输入) | 4.75V~5.25V 主电源输入 |
| 68 | 5V (输入) | 4.75V~5.25V 主电源输入 |
| 69 | GND | 接地(0V) |
| 70 | NC | 未连接 |
| 71 | NC | 未连接 |
| 72 | GND | 接地(0V) |
| 73 | GPIO21 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 74 | GPIO20 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 75 | GND | 接地(0V) |
| 76 | GPIO26 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 77 | GPIO16 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 78 | GND | 接地(0V) |
| 79 | GPIO19 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 80 | GPIO13 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 81 | GND | 接地(0V) |
| 82 | GPIO12 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 83 | GPIO6 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 84 | GND | 接地(0V) |
| 85 | GPIO5 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 86 | ID_SC | (RP1 GPIO 1) GPIO:通常为3.3V信号电平,但通过将GPIO_VREF连接至CM0_1.8V电源轨,可配置为1.8V信号电平 |
| 87 | GND | 接地(0V) |
| 88 | ID_SD | (RP1 GPIO 0) GPIO:通常为3.3V信号电平,但通过将GPIO_VREF连接至CM0_1.8V电源轨,可配置为1.8V信号电平 |
| 89 | GPIO7 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 90 | GND | 接地(0V) |
| 91 | GPIO8 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 92 | GPIO11 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 93 | GND | 接地(0V) |
| 94 | GPIO25 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 95 | GPIO9 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 96 | GND | 接地(0V) |
| 97 | GPIO10 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 98 | GPIO24 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 99 | GND | 接地(0V) |
| 100 | GND | 接地(0V) |
| 101 | GPIO23 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 102 | GPIO22 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 103 | GND | 接地(0V) |
| 104 | GPIO27 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 105 | GPIO18 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 106 | GND | 接地(0V) |
| 107 | GPIO17 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 108 | GPIO15 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 109 | GND | 接地(0V) |
| 110 | GPIO14 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 111 | GPIO4 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 112 | GND | 接地(0V) |
| 113 | GPIO3 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 114 | GPIO2 | GPIO接口:默认支持 3.3V 信号电平,但通过将 GPIO_VREF 引脚连接至 CM0_1.8V 电源,可切换为 1.8V 信号模式 |
| 115 | GND | 接地(0V) |
| 116 | WiFi_ON | (该引脚)可保持悬空;若被拉低至低电平,则将禁用Wi-Fi接口。内部通过10kΩ电阻上拉至CM0_3.3V电源 |
| 117 | BT_ON | (该引脚)可保持悬空;若被拉低至低电平,则将禁用蓝牙接口。内部通过10kΩ电阻上拉至CM0_3.3V电源 |
| 118 | LED_nACT | 低电平有效的Raspberry Pi活动状态指示灯;最大驱动电流5mA;该信号通常用于驱动Active状态指示灯 |
| 119 | CM0_3.3V (输出) | 3.3V±5% 精度。每引脚最大输出电流300mA,总和不得超过600mA;当GLOBAL_EN设置为低电平时将切断供电 |
| 120 | VREF_GPIO | 必须连接到CM0_3.3V(引脚41和119)以使用 3.3V GPIO,或连接到CM0_1.8V(引脚64和65)以使用 1.8V GPIO。此引脚不得悬空或接地。 |
| 121 | RPI_BOOT | 将此引脚置为低电平将强制从RPI服务器(如个人电脑或Raspberry Pi)启动;若不使用此功能,请保持引脚悬空;内部通过10kΩ电阻上拉至CM0_3.3V电源 |
| 122 | SD_VREF | 必须连接至CM0_3.3V(引脚41和119)以支持3.3V电平的SD_CLK、SD_CMD及SD_DAT0-3信号;或连接至CM0_1.8V(引脚64和65)以支持1.8V电平的对应信号;该引脚不得悬空或接地 |
| 123 | GND | 接地(0V) |
| 124 | SD_DAT1 | SD卡/eMMC Data1 信号(仅CM0Lite模块支持此信号) |
| 125 | SD_DAT0 | SD卡/eMMC Data0 信号(仅CM0Lite模块支持此信号) |
| 126 | GND | 接地(0V) |
| 127 | SD_CLK | SD卡时钟信号(仅CM0Lite模块支持此信号) |
| 128 | SD_CMD | SD卡/eMMC命令信号(仅CM0Lite模块支持此信号) |
| 129 | GND | 接地(0V) |
| 130 | SD_DAT3 | SD卡/eMMC Data3 信号(仅CM0Lite模块支持此信号) |
| 131 | SD_DAT2 | SD卡/eMMC Data2 信号(仅CM0Lite模块支持此信号) |
| 132 | GND | 接地(0V) |
4.2.1 引脚设计指南
以下指南提供接地规范、连接器使用、电压限制、电源轨注意事项以及防止错误电压应用的预防措施:
接地规范:必须连接所有接地引脚。
GPIO电压限制:GPIO 0至27号引脚与Pi5的40-Pin连接器规格相同。根据信号电平标准,其电压不得超过:
使用3.3V电平时:不得超过CM0_3.3V(引脚119-120)
使用1.8V电平时:不得超过CM0_1.8V(引脚64-65)
电源轨使用规范:若将CM0_3.3V或CM0_1.8V电源轨用于GPIO参考电压(GPIO_VREF)以外的设备供电,必须设计意外断电保护机制(如5V线路电压低于4.5V时):
使用1.8V电源轨(CM0_1.8V)时:需确保电流在电源骤降时归零(空载状态)
使用3.3V电源轨(CM0_3.3V)时:需确保3.3V电源轨电压始终高于1.8V电源轨电压。虽然断电时3.3V通常保持较高电平,仍需验证设计。若3.3V可能低于1.8V,应增加电路断开3.3V设备以防损坏
防反压保护:禁止在任何引脚上施加反向电压。这意味着当CM0断电或关机时,所有引脚不得施加外部电压,否则可能导致CM0无法重新启动。
4.2.2 差分对
建议差分对内的正负(P/N)信号线长度匹配误差控制在0.15mm内。不同差分对间的匹配容差可根据接口类型适当放宽,例如HDMI差分对间匹配通常可允许25mm偏差,因此常规电路板无需额外匹配处理。
- 100Ω差分对信号长度
CM0所有100Ω差分对的P/N信号长度匹配误差均小于0.1mm。建议接口板上的差分对也进行匹配处理。由于多数接口不要求不同差分对间精确匹配,CM0未完全保持差分对间的长度一致性。
- 90Ω差分对信号长度
CM0所有90Ω差分对(USB差分对)的P/N信号长度匹配误差均小于0.1mm。
4.3 电气规格
为确保CM0安全可靠运行,请严格遵守以下电气参数与限制条件。
4.3.1 绝对最大额定值
警告
若超出表6所列参数值,可能导致设备永久性损坏。该评级仅为应力参考值,不暗示设备可在操作章节规定范围以外的任何条件下正常运行。长期处于绝对最大额定值条件可能影响设备可靠性。
表6列出了CM0关键电压参数的绝对最大额定值。这些数值代表可能导致设备损坏的临界极限,严禁超出该限制范围。
表6 绝对最大额定值
| 名称 | 参数 | 最小值 | 最大值 | 单位 |
|---|---|---|---|---|
| VIN | 5V输入电压 | -0.5 | 6.0 | V |
| VGPIO_VREF | GPIO电压 | -0.5 | 3.6 | V |
| Vgpio | GPIO输入电压 | -0.5 | VGPIO_VREF + 0.5 | V |
提示
VGPIO_VREF为GPIO组基准电压,必须连接至CM0_3.3V或CM0_1.8V电源轨。
4.3.2 直流电气特性
表7详细列出了CM0 GPIO引脚的直流电气参数。该表描述了GPIO引脚在不同条件(如不同参考电压)下的表现特性,并提供了各参数(最小值、典型值和最大值)的预期范围。
表7 直流电气特性
| 名称 | 参数 | 条件 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|---|
| VIL(gpio) | 输入低电压 | VGPIO_VREF = 3.3V | 0 | - | 0.8 | V |
| VIH(gpio) | 输入高电压 | VGPIO_VREF = 3.3V | 2.0 | - | VGPIO_VREF | V |
| VIL(gpio) | 输入低电压 | VGPIO_VREF = 1.8V | 0 | - | 0.35*VGPIO_VREF | V |
| VIH(gpio) | 输入高电压 | VGPIO_VREF = 1.8V | 0.65*VGPIO_VREF | - | VGPIO_VREF | V |
| IIL(gpio) | 输入漏电流 | VGPIO_VREF = 3.3V | - | - | 5 | μA |
| IIL(gpio) | 输入漏电流 | VGPIO_VREF = 1.8V | - | - | 5 | μA |
| VOL(gpio) | 输出低电压 | - | - | - | 0.4 | V |
| VOH(gpio) | 输出高电压 | VGPIO_VREF = 3.3V | VGPIO_VREF - 0.4 | - | - | V |
| VOH(gpio) | 输出高电压 | VGPIO_VREF = 1.8V | VGPIO_VREF - 0.4 | - | - | V |
| IOL(gpio) | 输出低电流 | 16mA,VGPIO_VREF = 3.3V | 18 | - | - | mA |
| IOH(gpio) | 输出高电流 | 16mA,VGPIO_VREF = 3.3V | 17 | - | - | mA |
| IOL(gpio) | 输出低电流 | 16mA,VGPIO_VREF = 1.8V | 12 | - | - | mA |
| IOH(gpio) | 输出高电流 | 16mA,VGPIO_VREF = 1.8V | 10 | - | - | mA |
| RPU(gpio) | 上拉电阻 | 50 | - | 65 | kΩ | |
| RPD(gpio) | 下拉电阻 | 50 | - | 65 | kΩ |
4.3.3 电流消耗
表8列出了CM0在不同工作条件下的关键电流消耗特性。该表详细列出了在不同输入电压和控制信号下测得的典型关断电流、空闲电流及工作电流。实际数值与最终应用密切相关。
表8 CM0电流消耗特性
| 名称 | 参数 | 条件 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|---|
| Vshutdown | 关断电流 | GLOBAL_EN < 0.4V | - | 0.5 | - | mA |
| Vidle | 空闲电流 | GLOBAL_EN > 2V | - | 250 | - | mA |
| Vload | 工作电流 | GLOBAL_EN > 2V | - | 670 | - | mA |
4.4 热特性
CM0所采用的BCM2837系统级芯片(SoC)内置热管理功能,当芯片温度接近85°C时会自动降低时钟频率以控制温度。为避免过热,该SoC在高环境温度下可能自动启动性能调节机制。若通过降频仍无法有效控制温度,芯片外壳温度可能超过85°C。任何热管理方案都必须确保板上其他半导体元件的工作环境温度处于安全范围内。
CM0的整体工作温度范围为-20°C至+85°C(非冷凝环境)。无线射频性能在-20°C至+75°C温度区间内表现最优。
4.5 平均故障间隔时间(MTBF)
平均故障间隔时间(MTBF)用于衡量设备在发生故障前的平均预期运行时长。表9展示了CM0在不同环境条件下的MTBF值(该数值会随环境条件变化而异)。
提示
表9展示的MTBF的时间不包含CM0Lite。
表9 CM0的MTBF值
| 环境 | 描述 | CM0 MTBF |
|---|---|---|
| 地面受控环境 | 一个稳定、固定的受控环境,其温湿度均处于受控状态,例如实验室、商业及科研计算机中心、医疗设备室等。在此类环境中,设备通常具有更长的使用寿命。 | 374000小时 |
| 地面移动环境 | 高应力环境通常伴随振动、温度波动、湿度变化及频繁移动等特征,例如车载设备和手持通信设备所处的场景。在此类环境中,设备的使用寿命会显著缩短。 | 32000小时 |
5 故障排除
CM0需要稳定的电源才能启动。在开始运行之前,它会经历多个上电和启动阶段。如果在任何阶段发生错误,CM0可能无法正常启动或运行。以下步骤通过检查硬件电源和信号的电压及负载行为,帮助您诊断和解决问题:
带载测试5V电源:将GLOBAL_EN信号拉低,并在5V电源上施加0.5A的外部负载。电压应保持在4.75V以上(包括噪声),理想情况下应高于4.9V。
检查GLOBAL_EN是否为高电平:移除GLOBAL_EN的下拉电阻,然后检查GLOBAL_EN是否变为高电平;测量该引脚的电压或检查其逻辑状态以确认其为高电平。
确认各电源轨电压正常上升:
检查3.3V电源是否上升至3.15V以上。如果未达到,表示3.3V电源负载过大。
检查1.8V电源是否上升至1.71V以上。如果未达到,表示1.8V电源负载过大。
检查RUN_PG是否为高电平:测量该引脚电压,确认其高于3.15V。
通过活动LED(LED_nACT)验证启动过程:LED应闪烁表明正在启动;检查其未闪烁报错代码。关于错误代码模式的解读,请参阅Raspberry Pi官方文档的LED闪烁代码。
同时,我们建议通过确保系统软件(固件和内核)为最新版本来避免已知问题。因为新版本包含系统改进,且新内核版本通常包含重要的安全补丁和性能改进,故保持固件更新可解决许多系统问题并提高稳定性。
6 订购信息
CM0提供多个型号,可通过无线功能和eMMC存储容量进行区分。每个CM0型号均对应唯一的订单代码(部件编号)以供识别。
6.1 订购数量和包装
您可根据需要订购特定数量的CM0设备:可选择独立盒装发货(每个设备单独包装),也可选择整批订购(统一装入单个运输箱发货)。独立纸盒包装的小批量产品内置ESD涂层防护,无需额外使用防静电袋。该包装材料可回收,有利于减少废弃物。
6.2 部件编码
表10展示了CM0订购编码的构成,详细说明了模块、无线功能、RAM规格和eMMC存储的不同选项。
表10 CM0部件编码信息
| 型号 | 无线 | RAM LPDDR2 | eMMC存储 |
|---|---|---|---|
| CM0 | 0 = No | 00 = 512MB | 000 = 0GB (Lite) |
| 008 = 8GB | |||
| 016 = 16GB | |||
| 1 = Yes | 00 = 512MB | 000 = 0GB (Lite) | |
| 008 = 8GB | |||
| 016 = 16GB | |||
| 示例型号 | |||
| CM0 | 1 | 00 | 016 |
6.3 产品型号
表11按部件编号列出了CM0的可用型号,详细说明了无线支持、RAM大小、eMMC存储容量及RPL编号等信息。其他配置可接受定制订购。
表11 CM0产品型号(包含CM0Lite)
| 型号 | 无线 | RAM LPDDR2 | eMMC存储 | RPL编码 |
|---|---|---|---|---|
| CM0000000 | - | 512MB | Lite (0 GB) | SC2230 |
| CM0000008 | - | 512MB | 8 GB | SC2231 |
| CM0000016 | - | 512MB | 16 GB | SC2232 |
| CM0100000 | Yes | 512MB | Lite (0 GB) | SC2233 |
| CM0100008 | Yes | 512MB | 8 GB | SC2234 |
| CM0100016 | Yes | 512MB | 16 GB | SC2235 |